- The University , Research
- 22/12/2023

AI to create greener traffic and improve safety in smart cities
AI decides the most optimal traffic light settings for CO2 reduction
“Currently our smart cities aren’t as optimized as they could be from what science has to offer”, associate professor Egor Bondarev says. And he wants to change that with an AI traffic analysis model.
“At present, the transportation industry tries to control traffic lights by in-road induction loops in order for cars to have to brake less, which is better for the CO2 emissions", Bondarev says. "But induction loops are extremely expensive and therefore doesn’t have potential for wide deployment in smart cities. Besides that, the current use of CCTV camera footage could also be way more efficient. Of all the camera footage of Dutch roads only a very small part is manually looked or analyzed by algorithms for safety.”
Bondarev together with his PhD students Erkut Akdag and Giacomo D’Amicantonio (VCA group, Electrical Engineering) is finishing their SMART project with an AI traffic analysis model solving both of the above issues in one technology. The local city of Helmond is the lucky municipality to participate in the pilot.
“Rijkswaterstaat (Department of Water Ways and Public Works) told us they have many cameras next to the Dutch highways. But they maybe look at 10 percent of all streams in average at most. If something bad happens on a highway, they hope to get a call (by 112 or police for example) and only after that they look at the camera of the area to see what’s happening. But you lose time this way and the first minutes are the most critical for people seriously injured in a traffic accident or crime scene.” However, finding an robust way to detect accidents and threats on roads earlier and more efficiently is only one of the problems in smart cities, Bondarev noticed.
“Big cities tend to have a lot of intersections. Cameras and induction loops there only react to vehicles located very close to the intersection by turning the light from red to green for example if the situation allows. But if you’re already very close to the intersection, you probably braked already regardless. You’re almost standing still and then the light turns green. You might have had a similar experience yourself. That’s a waste of energy of the car, less efficient and causes a higher CO2 emission.”
Just placing more induction loops would be very expensive. Mounting the loops earlier to detect the far-approaching traffic also does not solve the problem, as then there is too much uncertainty what happens in the space between the loop and the lights. “Our group made an AI solution to make traffic movements greener and solve safety problems.”

First of all, together with ViNotion and RoyalHaskoning, they installed new intelligent cameras both on the intersection and further away from the intersection for the approaching traffic in Helmond. “Our AI software generating a traffic density model, is able to distinguish between cars, cyclists and pedestrians but also heavy trucks (often on diesel, the worst emission-wise), trucks with dangerous goods for example and priority traffic like police or ambulance vehicles", Bondarev says.
"With the input we get from the approaching traffic density, we compute the best way to control the traffic lights to get the lowest CO2 emission possible.” That sounds like you will try to prevent cars and other motorized vehicles from braking unnecessarily, but that also implies cyclists and pedestrians will wait the longest like already is the case on some intersections? “We definitely take their interest into consideration. It’s important to stimulate biking and walking in cities. Also, the municipalities can let the system know what is their policy: if cyclists get priority, our intelligent traffic light control system will prioritize them over cars for example. So the model policies can be selected according to the wishes of the municipality.”
Platoons of cyclists
Helmond is the first municipality working with the traffic model of Bondarev’s research group. “In this municipality they also hope to get more people cycling. To cater to cyclists, we try to get them to ride in platoons that see only green lights. That’s something you can enable by the smart traffic light control. The cameras see the cyclists approaching and can decide that for example after six cyclists, the light turns green. They all leave, plus maybe a few more that arrive while the light is still green. They bike and will arrive again at the next light at some point. Again, when a group of them approaches, before they have to brake, the light will turn green and so they keep moving in groups.”
How about the differences on the bike path? Fast electrical bikes, average cyclists, old grandma on a regular bike? “The system will definitely not cater to the fastest nor the slowest person. We cater to the average that manage to form a group because of their average speed”, Bondarev says.
Acting out at 4 AM
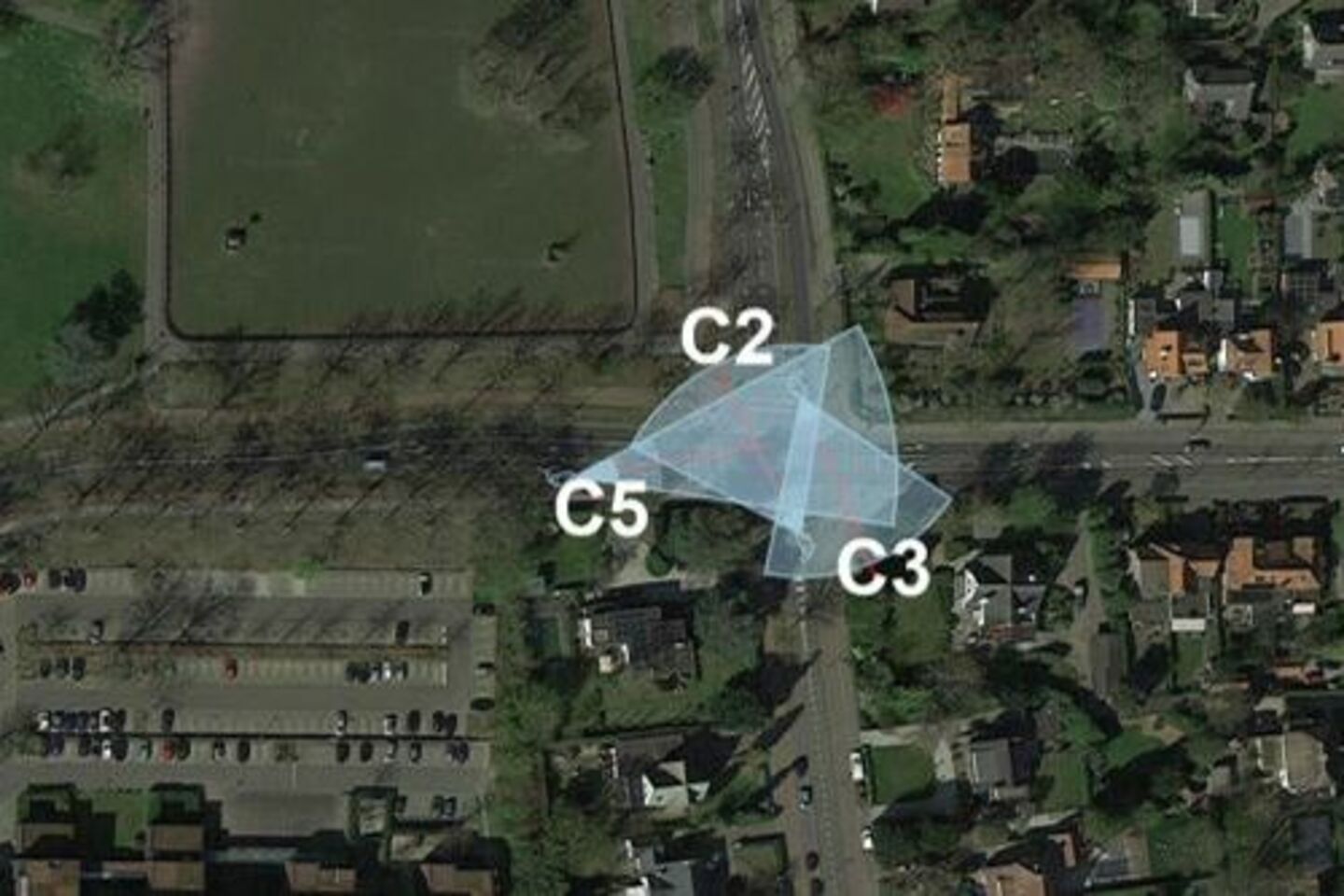
Bondarev’s research playground is at the intersection of Julianalaan and Aarle-Rixtelseweg in Helmond. The project is also tested in Victoria City, Canada. “We work together for the R&D results. In the Netherlands, RoyalHaskoning is the party controlling the traffic lights and with ViNotion, we build this smart traffic control and analysis pilot. Cyclomedia made the 3D digital twin we used for the model.”
The new way of placing the cameras and the model analyzing the traffic input and controlling the lights solved the issue which the induction loops can’t. But how about the control room with the footage? How will this improve Rijkswaterstaat or the municipality looking at the footage right away when a problem occurs? “Our model has also been trained to detect strange behavior, like opposite lane driving, littering, traffic accidents, aggressive behavior, zig-zag driving, illegal parking, fighting, et cetera. When such things happen, an automatic message pops up in the control room together with the right camera view.”
In order to teach the system what these accidents or behavior looks like, the researchers had to play and record all these things at a deserted summer morning at the intersection. Bondarev smiles: “My PhD student and I had quite some fun” as he shows Cursor the videos that they used to teach the model. People driving on the Julianalaan don’t have to worry: all footage is encrypted and anonymized for us and only the police may have access to the full footage at this moment.
No cameras in the future
The project partners will have an evaluation with the municipality of Helmond in February 2024. “We installed the cameras and started this project a year ago. A lot of experiments, tests and data collection have been done from that moment. And of course we need to hear from the municipality how can we further improve. But we hope for continuation and we believe that could make it even more advanced.”
How much more advanced could it get then? Bondarev grins. “In the future we may be able to do many of these things without cameras, but via the mobile phones of road users. In these modern phones there are sensors, like inertial measurement units, accelerometers, compasses that can be used to estimate where people are located and in what direction they are heading. By cooperating with Flitsmeister, we could build detailed real-time traffic density models from in-car smartphone sensors (under the user agreement). The accuracy of those sensors does need to improve though, but I see that happening in the future.”
What would be the industrial advantage of using mobile phones? “We won’t have to place all these cameras anymore. That saves a lot of money. Plus people tend to not like surveillance cameras.”
But I could imagine they like it even less to be followed on their phone? “Well, they have the option to opt out of course, something they don’t have with the road cameras. And in practice we see most people do want to use an online map app so the majority will most likely agree. The few that do opt out won’t cause a problem for the model creation.”
Are you working for a municipality and you also got interested in this pilot? Contact Egor Bondarev via email to see if a pilot is also possible in your area.

{kind=link}
{kind=link}
Discussion