- Research , Home Stretch
- 20/11/2024

Home Stretch | Collectively changing shape
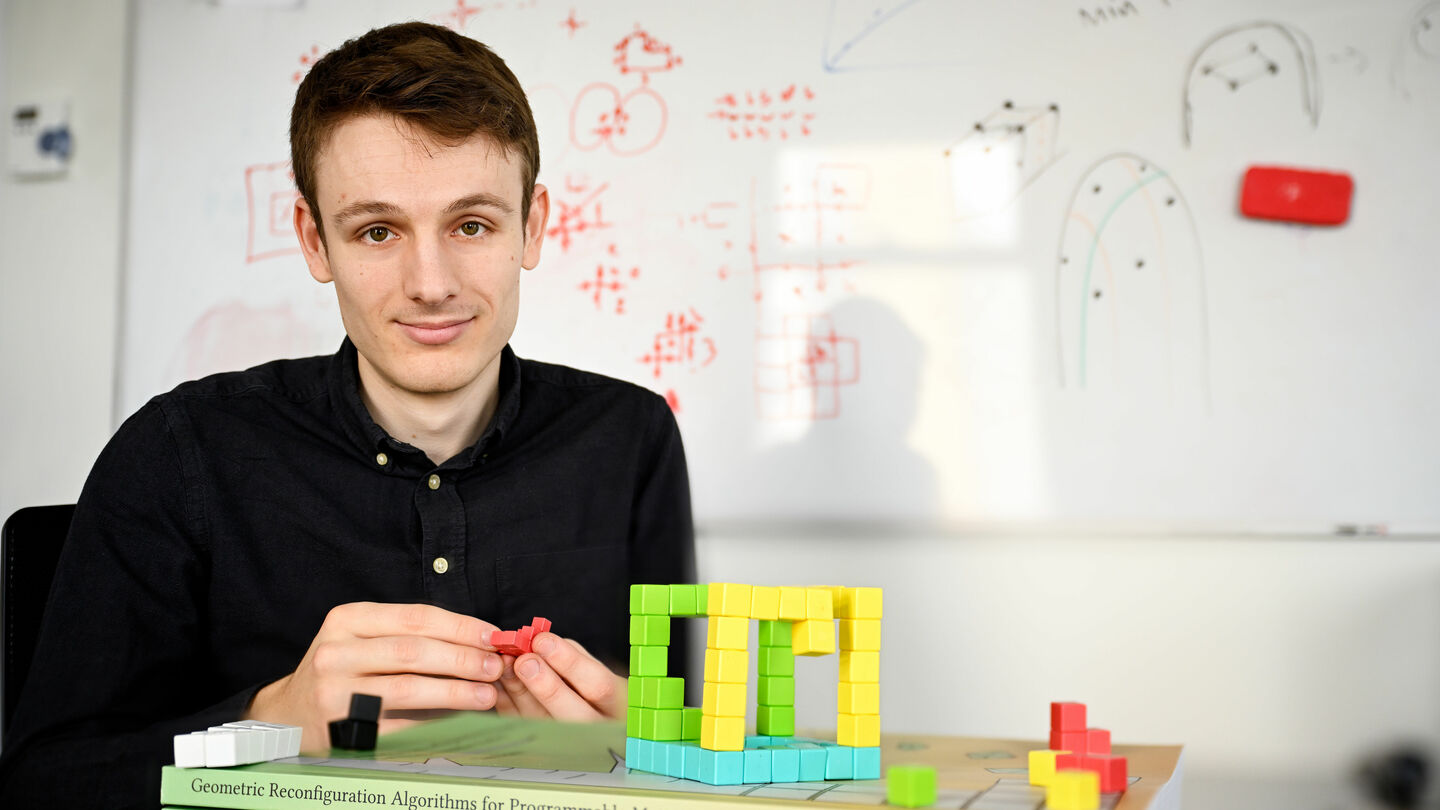
Tom Peters makes miniscule robots move together thanks to new algorithms
It seems like science fiction, a blob of material that can become whatever you need, but that’s exactly what TU/e mathematician Tom Peters is trying to create. He developed different algorithms to make groups of miniscule robots move and change shape. On Wednesday, November 20, he will defend his dissertation at the Department of Mathematics and Computer Science.
His hands click the magnetic blocks that are always on his desk into a cube-like shape at lightning speed. “As a child, I never played with LEGO that much,” Tom Peters admits with a laugh, “but when it comes to playful building, I’ve made up a lot of ground thanks to these magnets.” They aren’t just on his work bench. For the past four years, Peters has been working on the question of how to make a group of nanobots – minuscule robots – work together. Because once that works, “the sky is the limit,” says Peters. “You can have robots built in places where it would normally be very difficult due to the circumstances, you can deliver medicine to the right place in the human body, you can build with DNA, you can adjust materials, you can turn a fork into a hammer.” But before that happens, you need to be able to correctly control a group of nanobots. Peters hopes to contribute to this ability by developing new algorithms.
In technical terms, it concerns ‘programmable matter’, but in practice it’s easier to explain things by using the term ‘a group of nanobots’, says Peters. Having said that, he didn’t touch a single robot during his entire research project. “I reduce the nanobots to small particles, and then I use my laptop to throw all kinds of models at them.” One of these models is the ‘sliding cubes’ one, on which he made an elaborate video with some other researchers. Peters picks up his magnetic blocks again. “By making the cubes slide across each other, you can incite movement. Take the pieces of origami art by physician Heinz Strobl, like the Wobbling Wall. Making them move is fun, but how can you also change their shape? I looked at the shape-changing process from a very abstract perspective.”
From pigeon to fish
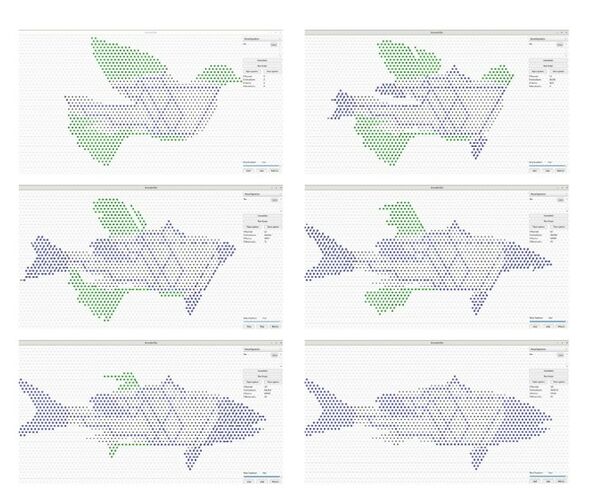
Another model that Peters investigated is based on the movement of single-celled organisms, amoebas. These can change shape by extending and retracting false feet, Peters explains. “Amoebots move in a similar way. The robots extend on a grid and then retract. With new algorithms, we want to improve the existing Amoebot model, thereby creating new movements.”
And they managed. Where the Amoebots first had to take on an intermediate shape – a single file, for example – before they could change into a new one, they can now do so directly. Peters shows a video of such a direct change of shape. A group of dots in the shape of a pigeon appears on his screen. They then shift positions in a coordinated manner until the image shows a fish. “It may seem like we’re just goofing off with a video like this, turning a pigeon into a fish. But the underlying idea is unique. With these new algorithms, we have really been able to take a step toward making robots move together more efficiently.”
On the moon
Of course, this is fundamental research and the translation from laptop to actual robot communication will have to overcome new challenges, Peters emphasizes. But developments are moving very fast. Peters was able to experience with his own eyes that programmable matter is no longer merely the stuff of science fiction during his trip to the National Aeronautics and Space Administration (NASA), which is responsible for American space research. He spent three months in California, improving algorithms that control construction robots. “Building things is a little different on the moon. Special robots can pick up cube-shaped building blocks and place them somewhere else and click them together. But in what order can they best pick up those cubes to be able to build as quickly as possible? It doesn’t concern nanobots – these robots are quite a bit bigger – but the idea behind them is the same. How do you get a group of robots to work together efficiently? There are so many possibilities already. And if we can progress to an adaptable material, you would always have the right tool. For whatever you want.” With a smile: “That still sounds very futuristic, actually.”
PhD in the Picture
{kind=link}
{kind=link}
What is that on the cover of your dissertation?
“All four models in which I’ve innovated algorithms are presented schematically. With a focus on cubes, of course, which fall from a spring beam and are picked up by mini-robots on the back. Change has really been a common thread in my project.”
You’re at a birthday party. How do you explain your research in one sentence?
“I make mini-robots work together, like in the animated movie Big Hero Six. This captures people’s attention, without taking it out of the realm of science fiction.”
How do you blow off steam outside of your research?
“I like to play the piano and get rid of some excess frustration by playing a nice game of badminton now and then. I’ve played competitively for years, at my club in Geldrop.”
What tip would you have liked to receive as a beginning PhD candidate?
“Ask for help in time. I started my PhD in the COVID pandemic and spent a lot of time at home. No problem for a fundamental research project, I thought for a long time. But science is a very creative process; together you can achieve a lot more than you think. I noticed that when I got stuck. An afternoon of brainstorming together, with pieces and building blocks scattered throughout the room was such a relief. Together it’s a lot easier. Just like with the nanobots, actually.”
What is your next step?
“I would really like to continue doing this kind of research, and I’m busy looking for a suitable postdoc project. Ideally in the form of an adventure abroad, but if a challenging project in the Netherlands came along, that would definitely be an option too.”
Discussion