
- Research
- 6 min
- 23/02/2026

Autonomous boats inspect pipes and cables on the seabed
TU/e researchers develop AI for monitoring deep-sea infrastructure
European seas are full of cables and pipelines, which are vulnerable to sabotage. TU/e researcher Egor Bondarev's AIMS lab is contributing to the development of autonomous surveillance boats that use AI to monitor the seabed.
The seabed contains hundreds of thousands of kilometers of pipes and cables that transport gas and data, for example. In addition to this critical infrastructure deep underwater, the North Sea is also full of oil and wind platforms, also crucial to our energy supply.
This seabed infrastructure has proven vulnerable, as evidenced by numerous incidents in recent years, often only discovered after the damage had already been done. The most well-known example is the destruction of Nord Stream 1 and 2 on September 26, 2022. The gas supply was disrupted at a depth of 80 meters.
Ukraine is suspected of the sabotage, but the case remains unresolved. Sabotage deep under the sea can be carried out, for example, by divers or submarines, or by dragging an anchor along the seabed, damaging the infrastructure.
Between the attacks on Nord Stream and now, several incidents have occurred in European waters. These include the sabotage of a fiber-optic cable between Latvia and Sweden (February 2025), a gas pipeline and telecommunications cables—the Balticonnector—between Finland and Estonia (October 2023), and the Estlink 2 power cable between Finland and Estonia (December 2024). China and Russia are suspected of the latter two incidents, respectively.
Now that the consequences of geopolitical tensions are also affecting the seabed, it is crucial that Europe protects its underwater infrastructure. But how?
European Collaboration within PROACTIF
Egor Bondarev is an associate professor at the TU/e department of Electrical Engineering. In his AIMS lab, he researches and develops AI models for systems equipped with various types of sensors.
Along with researchers from nine countries, Bondarev is part of the PROACTIF project team, which is working on autonomous solutions for monitoring the condition of infrastructure. The Dutch contribution focuses specifically on maritime infrastructure.
The ECO research group from Electrical Engineering is also involved in PROACTIF. This group focuses on reliable communication tools, which in this case can be used to transmit information from international waters to the shore.
No man's land
Who is actually responsible for the seabed and the infrastructure located there? The first 12 nautical miles from the coast fall under the jurisdiction of the country bordering the coastline. After that, there is an intermediate area of also 12 nautical miles, over which the state in question has limited authority. The area beyond those 24 nautical miles is open sea and, in principle, belongs to no one.
Rijkswaterstaat (the Directorate-General for Public Works and Water Management) is responsible for the seabed that falls under Dutch authority. However, the owners of cables, pipelines, and other infrastructure in the sea must maintain them themselves. But how do you keep an eye on the state of thousands of kilometers of pipelines located deep below sea level?
Boat development
Monitoring all those hundreds of thousands of kilometers of infrastructure is a monumental task that would require an unrealistically high amount of manpower. PROACTIF is working on a solution that circumvents this problem: surveillance boats that sail autonomously and collect data.
TU/e is collaborating with companies including Demcon and Van Oord to make the right boat for the project. Captain AI provides the option for autonomous navigation. Vinotion and CSEM among others provide sensors, the first a 360-degree camera, the latter the LiDAR sensor for underwater vision.

{kind=link}
{kind=link}
{kind=link}
Demcon and the partners are developing an autonomous vessel (see photo), equipped with high-tech sensors to collect environmental data. Although the boat is currently controlled by a remote pilot, a team of researchers is teaching the vessel to navigate without human intervention.
Using AI, the team is teaching the boat to identify obstacles such as buoys, floating objects, and other vessels and to navigate safely around them. The goal is for the vessel to eventually navigate completely independently on open water.
Autonomous inspection
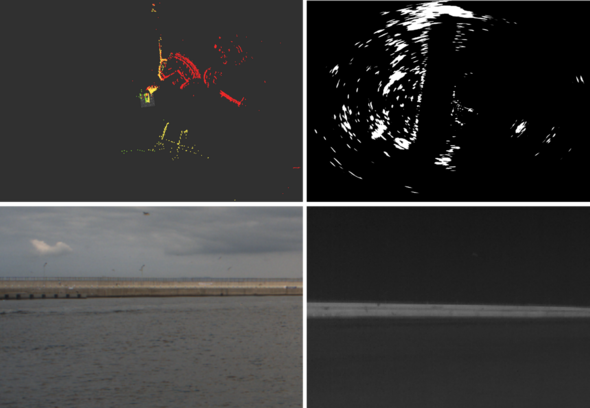
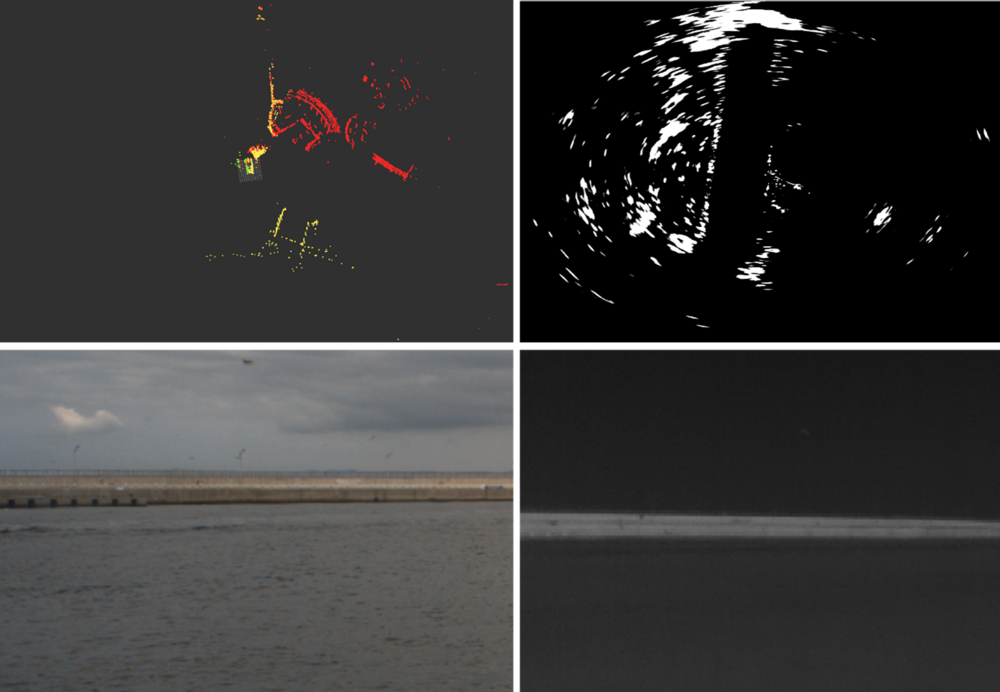
The boats will sail on the water, but their equipment also allows them to collect data (deep underwater) to monitor infrastructure on the seabed. "On the inspection boat, we use a 360-degree camera, a thermal imaging camera, radar, an IMU (infrared motion detector), and a LiDAR—a device that uses laser pulses to generate a 3D image of the environment," explains Bondarev.
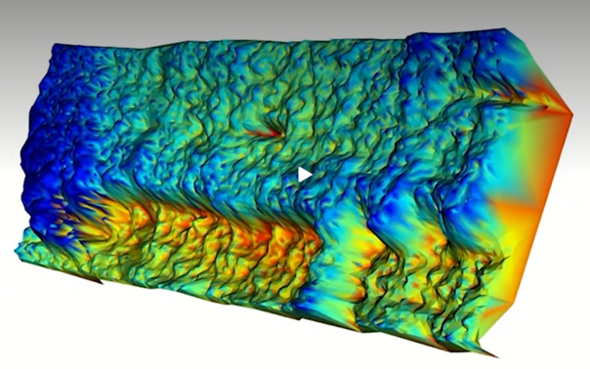
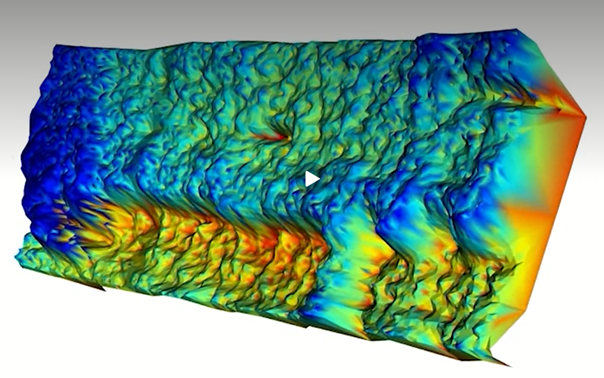
The researchers combine the resulting 2D images, 3D point clouds, and acoustic data on their computers in analysis software to detect damages and other problems affecting the infrastructure. Combining the various data ensures a clear picture, regardless of weather conditions or the dark.
Challenges
However, combining the data from these sensors into a single, integrated analysis presents a serious challenge, precisely because the data is so diverse. Maritime radar produces 2D data in a horizontal plane, while visual cameras display their 2D data in a vertical plane. LiDARs provide 3D point clouds, while the sonars used on the boat display their measurement results in lines.
Moreover, each sensor responds to different types of objects. Maritime radars record reflections from metal surfaces, sonars ‘see’ medium-hard to hard surfaces, while visual sensors can detect even microscopic particles.
The biggest challenge for the AIMS team lies in making all these different types of sensors and output formats work together, both for the boat's navigation and for creating a complete inspection image.
The researchers’ approach is twofold: merging all data streams into a single AI pipeline that learns about the intrinsic properties of each type of measurement. Then, depending on the inspection objective and environmental factors, the AI learns to weight the most relevant measurements more heavily in the analysis.
Bondarev will be busy with the PROACTIF project for the next few years, but the first experiments with the boats on open water have already been conducted on the Dutch west coast.
This article was translated using AI-assisted tools and reviewed by an editor.
Discussion