
- Onderzoek
- 23/02/2026

Zelfvarende bootjes inspecteren leidingen op de zeebodem
TU/e-onderzoekers ontwikkelen AI voor de bewaking van infrastructuur in de diepzee
De Europese zeeën liggen vol kabels en pijpleidingen, die gevoelig zijn voor sabotage. Het AIMS-lab van TU/e-onderzoeker Egor Bondarev draagt bij aan de ontwikkeling van autonome surveillanceboten die met AI de zeebodem bewaken.
Op de bodem van de zee liggen honderdduizenden kilometers leidingen en kabels die bijvoorbeeld gas en data vervoeren. Naast die kritieke infrastructuur diep onder water, staat onder andere de Noordzee ook vol met olie- en windplatforms, eveneens cruciaal voor onze energievoorziening.
Die infrastructuur in de zee blijkt kwetsbaar, getuige de vele incidenten in de afgelopen jaren, vaak pas ontdekt als het leed al geschied was. Het bekendste voorbeeld is de vernieling van Nord Stream 1 en 2 op 26 september 2022. Op 80 meter diepte werd die gastoevoer kapot gemaakt.
Oekraïne wordt verdacht van de sabotage, maar de zaak is nog altijd niet opgelost. Het saboteren diep in de zee kan bijvoorbeeld met duikers of onderzeeërs, of door een anker over de zeebodem te laten slepen.
Tussen de aanvallen op de Nord Stream en nu zijn er in de Europese wateren verschillende incidenten geweest. Denk bijvoorbeeld aan sabotage van een glasvezelkabel tussen Letland en Zweden (februari 2025), een gaspijpleiding en telecommunicatiekabels – de Balticonnector – tussen Finland en Estland (oktober 2023) en de Estlink 2-stroomkabel tussen Finland en Estland (december 2024). Van de laatste twee incidenten worden respectievelijk China en Rusland verdacht.
Nu de gevolgen van geopolitieke spanningen zich ook op de zeebodem laten gelden, is het van belang dat Europa haar infrastructuur onder water weet te beschermen. Maar hoe?
Europese samenwerking binnen PROACTIF
Egor Bondarev is universitair hoofddocent bij de TU/e-faculteit Electrical Engineering. Hij ontzoekt en ontwikkelt in zijn AIMS-lab AI-modellen voor systemen die zijn uitgerust met verschillende soorten sensoren.
Met onderzoekers uit negen landen maakt Bondarev deel uit van het projectteam PROACTIF, dat werkt aan autonome oplossingen om de staat van infrastructuur te monitoren. De Nederlandse inbreng richt zich specifiek op maritieme infrastructuur.
Vanuit Electrical Engineering is ook de ECO-onderzoeksgroep betrokken bij PROACTIF. Deze groep houdt zich bezig met betrouwbare communicatiemiddelen, die in dit geval ingezet kunnen helpen om data vanuit internationale wateren naar de wal te krijgen.
Niemandsland
Wie is eigenlijk verantwoordelijk voor de zeebodem en de infrastructuur die zich daarop bevindt? De eerste 12 zeemijlen vanuit de kust vallen onder de jurisdictie van het land dat aan de kustlijn grenst. Daarna is een tussengebied van eveneens 12 zeemijl, waar de betreffende staat in beperkte mate iets over te zeggen heeft. Het gebied voorbij die 24 zeemijl is open zee en is in principe van niemand.
Rijkswaterstaat is verantwoordelijk voor de zeebodem die onder Nederlands gezag valt. De eigenaren van kabels, leidingen en andere infrastructuur in de zee moeten die echter zelf onderhouden. Maar hoe check je de staat van duizenden kilometers aan leidingen die diep onder de zeespiegel liggen?
Botenontwikkeling
Het monitoren van al die honderdduizenden kilometers infrastructuur is een gigantische klus die onrealistisch veel menskracht zou vragen. PROACTIF werkt aan een oplossing die dit probleem omzeilt: surveillancebootjes die autonoom varen en data verzamelen.
De TU/e werkt hiervoor samen met onder andere Demcon en Van Oord om de boot passend te maken voor het project. Captain AI verzorgt het autonoom varen. Vinotion, CSEM en andere partners leveren sensoren om de metingen te doen. De eerstgenoemde zorgt voor een 360-gradencamera en CSEM levert een LiDAR-sensor voor onderwaterzicht.

{kind=link}
{kind=link}
{kind=link}
Demcon en de partners ontwikkelen een autonoom vaartuig (zie foto), uitgerust met hightech sensoren om gegevens uit de omgeving te verzamelen. Hoewel de boot momenteel wordt bestuurd door een piloot op afstand, leert een team van onderzoekers het schip navigeren zonder menselijke tussenkomst.
Het team leert de boot middels AI obstakels zoals boeien, drijvende objecten en andere schepen te identificeren en er veilig omheen te varen. Het doel is dat het schip uiteindelijk volledig zelfstandig op open water navigeert.
Autonoom inspecteren
De boten varen op het water, maar kunnen door hun uitrusting ook (diep) onder water data ophalen om de infrastructuur op de zeebodem in de gaten te houden.
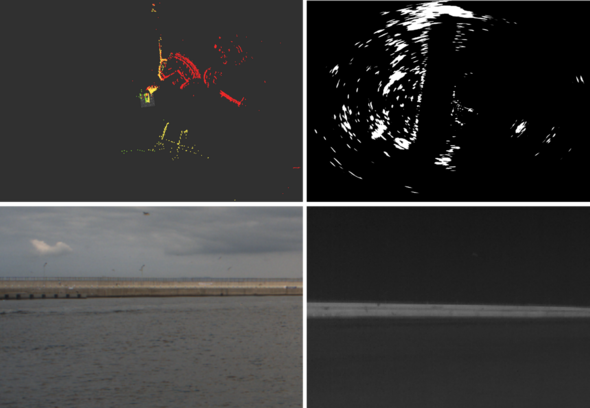
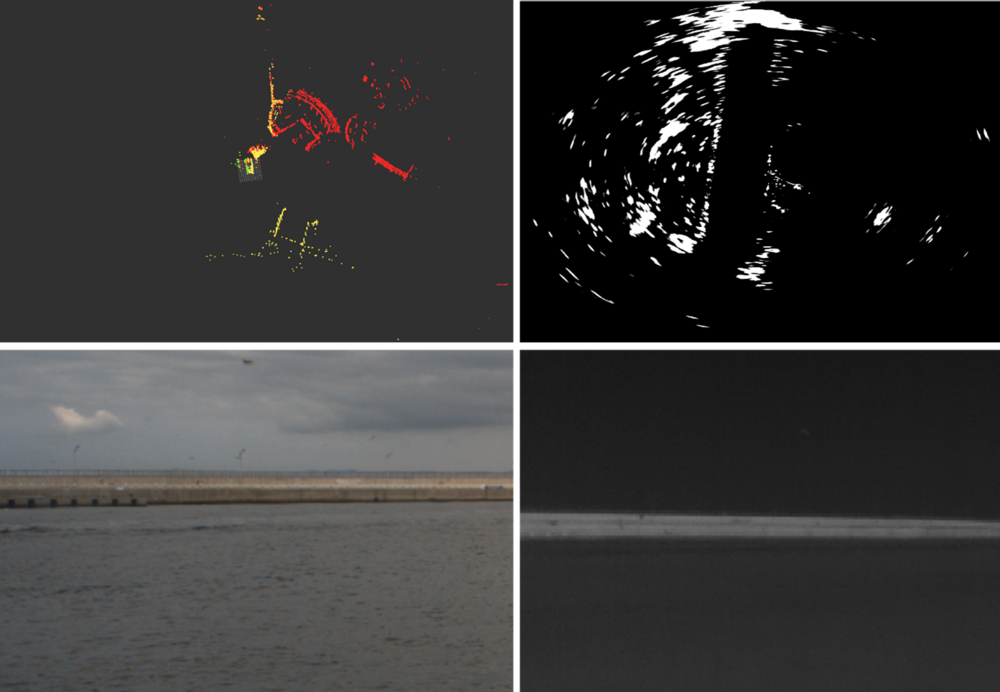
“Op de inspectieboot gebruiken we een 360-gradencamera, een warmtebeeldcamera, radar, IMU-bewegingsdetector) en LiDAR – een apparaat dat met laserpulsen een 3D-beeld van de omgeving genereert”, vertelt Bondarev.
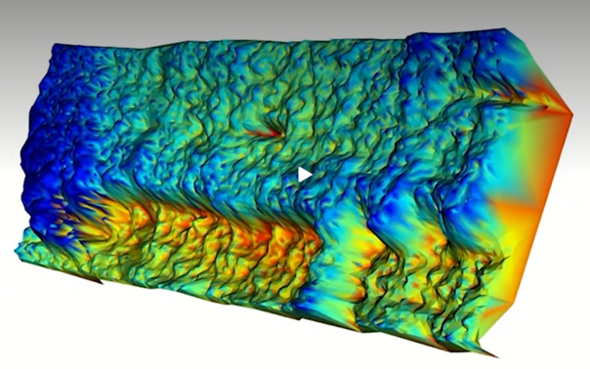
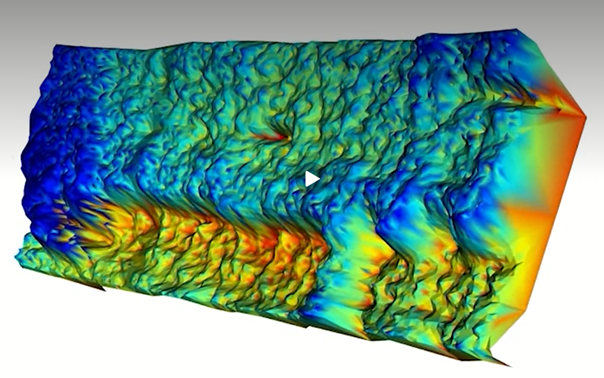
De 2D-beelden, 3D-puntenwolken en akoestische gegevens die daaruit komen, voegen de onderzoekers op hun computer samen in analysesoftware om schade en andere problemen met de infrastructuur op te sporen. Het samenvoegen van de verschillende data maakt dat je onder alle weersomstandigheden en in het donker alsnog een goed beeld krijgt.
Uitdagingen
Het samenvoegen van de gegevens van alle sensoren in één integrale analyse is echter een serieuze uitdaging, juist omdat de data zo uiteenlopend van aard zijn. De maritieme radar produceert 2D-gegevens in een horizontaal vlak, terwijl visuele camera’s hun 2D-data in een verticaal vlak weergeven. En LiDAR's leveren 3D-puntenwolken, terwijl de gebruikte sonars hun meetresultaten in lijnen weergeven.
Bovendien reageert elke sensor op andere objectsoorten. Maritieme radars registreren de reflectie van metalen oppervlakken, sonars ‘zien’ middelharde tot harde oppervlakken, terwijl visuele sensoren zelfs microscopisch klein deeltjes kunnen detecteren.
De grootste uitdaging voor het AIMS-team zit in het laten samenwerken van al deze verschillende typen sensoren en outputvormen, zowel voor de navigatie van de boot als voor het maken van een compleet inspectiebeeld. De aanpak die de onderzoekers hiervoor gebruiken is tweeledig: het samenvoegen van alle datastromen in één zogenaamde AI-pipeline die leert over de intrinsieke eigenschappen van elke soort meting. En vervolgens de AI te laten leren om, afhankelijk van het inspectiedoel en de omgevingsfactoren, de meest relevante metingen zwaarder te laten wegen in de analyse.
Bondarev is de komende jaren nog zoet met het PROACTIF-project, maar de eerste experimenten met de boten op open water zijn al gedaan aan de Nederlandse westkust.
Discussie