
- Research
- 4 min
- 07/04/2026

Home stretch | A handy robot that doesn’t get distracted
In the future, robots could take over all kinds of boring chores, from unloading the dishwasher to ironing clothes. To do these tasks well—and without getting distracted—they need to learn how to filter out irrelevant information from their surroundings. At TU/e, PhD researcher Bram Grooten is developing algorithms that help robots adapt to new situations while staying focused on the task at hand.
When Grooten presented his research in five minutes at the Talking Science pitch competition, he held a toilet brush in his hand—a playful nod to household robots that could take over tedious chores, like cleaning the toilet or folding clothes. But behind the joke lies a personal motivation. “It’s my dream to make this a reality,” he says.
“As a kid, I always wondered if unloading the dishwasher could be automated,” Grooten recalls. Twenty years later, part of that future has arrived: many households have a robot vacuum, but robotic help beyond that is still limited. “Even simple tasks are far harder for robots than you might think,” he says.
“Take folding clothes, for example, which is a major area of research,” he explains. He grabs his own sweater and tosses it crumpled onto the table. “See, it’s tricky for a robot to figure out how it all goes together. Every action we humans take for granted, a robot has to learn—and it has to do that for all kinds of different clothing items.”
Reinforcement learning
To turn a robot into a useful helper, you first need to give it a task, Grooten explains. One way to train a robot is by showing it countless examples. You can also build computer simulations that generate many scenarios in a short time, giving the robot more practice.
A common approach is called reinforcement learning. The robot receives positive points when it performs an action correctly and negative points when it makes a mistake. Its goal is to accumulate as many points as possible. Through trial and error, it gradually learns what is expected.
More adaptive
But robots often learn behaviors that only work well in the specific situations they were trained for. If something changes—a garment is folded differently, or the surroundings look different—the robot can get confused. Move it to another room, for instance, and it might be distracted by the wallpaper, a wooden floor, or a TV that’s on.
In the future, household robots may have access to a flood of data: the temperature in each room, what’s in the kitchen cabinets, how often the doorbell rang that day. “But for a specific task—like making a cup of coffee—only a tiny fraction of that information matters,” Grooten says. All the extra input can actually confuse a robot trained with standard reinforcement learning.
The goal, then, is to create robots that can stay focused on their task, even when faced with unexpected distractions. “In my field, we try to make robots more adaptive. The methods we use are called adaptive reinforcement learning,” Grooten explains. This helps robots generalize across different situations and handle new visual backgrounds or environmental sounds. “We want a robot to understand what to do, even in unexpected situations.”
Smart algorithms
To achieve this, Grooten developed algorithms such as ANF (Automatic Noise Filtering) and MaDi (Masking Distractions), which help a robot ignore irrelevant information. ANF filters out environmental noise, while MaDi masks irrelevant pixels by darkening them so the robot isn’t distracted.
With tools like ANF and MaDi, robots can focus on what really matters—even in changing or unfamiliar environments.
Real robots
Grooten first tested these methods in simulations: the robot performed a simple task against a neutral background. Then the researchers swapped in random images to see if the robot could still complete the task. It worked—the robot ignored the background and didn’t get confused.
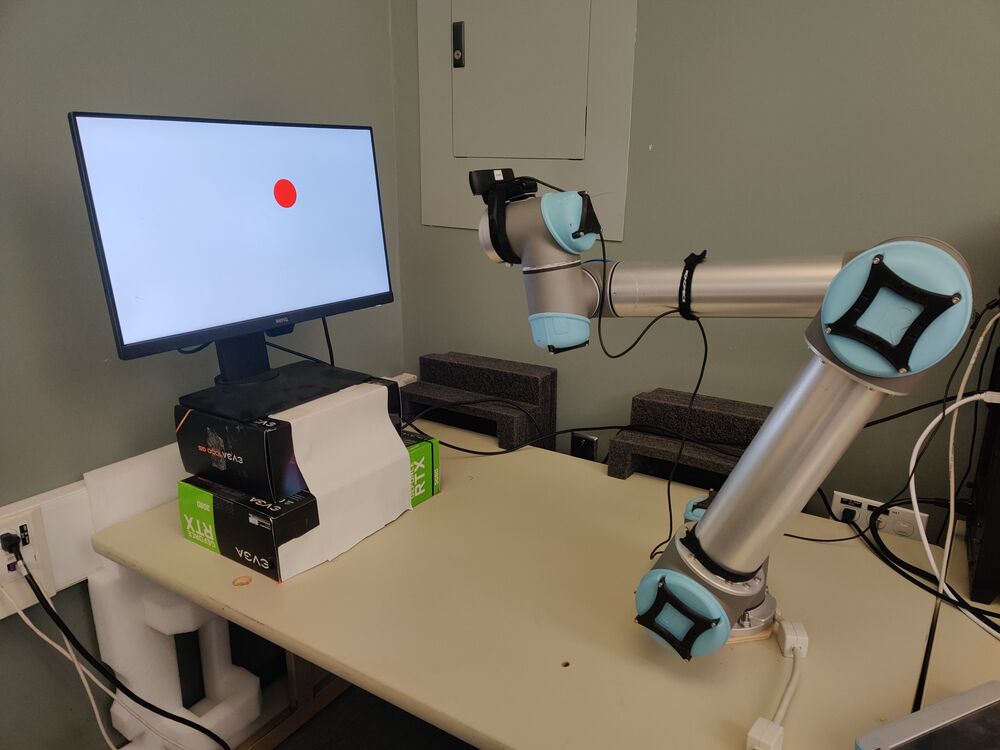
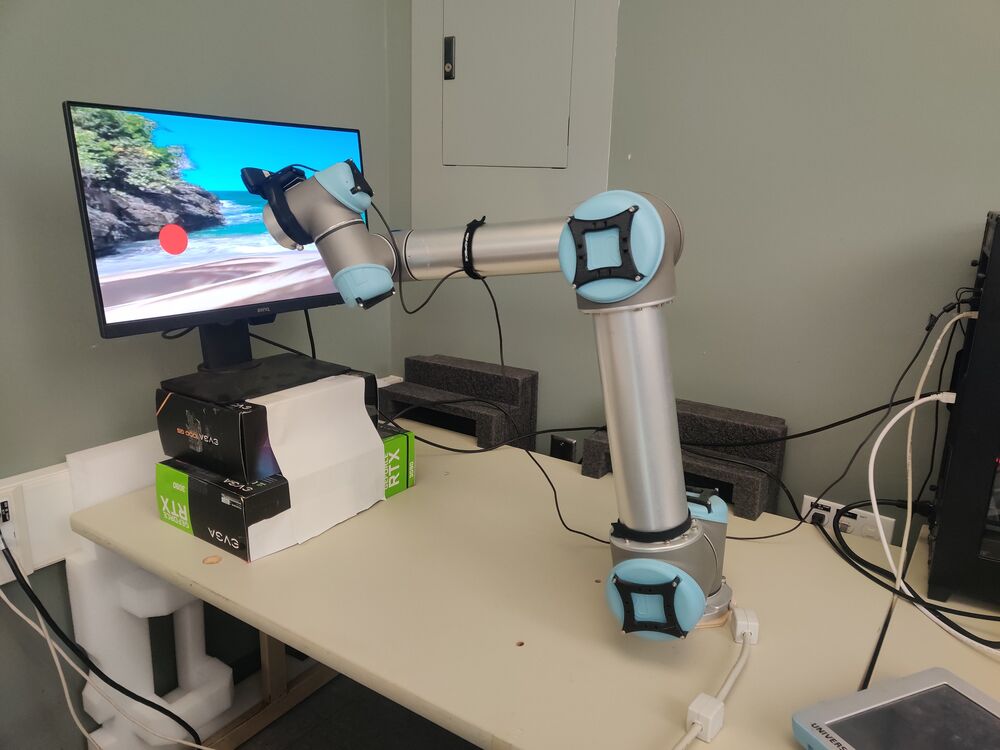
“The fun part is testing it on a real robot,” Grooten says. “We trained a small robot with a webcam to get as close as possible to a red dot on a screen. Once it mastered that, we replaced the white background with all kinds of images. Even there, MaDi produced good results after just two hours of training.”

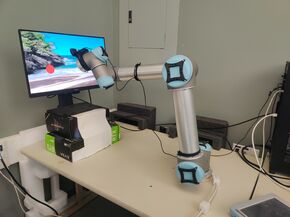
“The best part of this research,” he adds, “is that you build an algorithm and then actually see the robot doing what it’s supposed to do. That’s when it all becomes tangible, and I love that.”
PlayStation
During his PhD, Grooten spent six months at Sony AI developing the SPARC algorithm, which allows a robot trained in simulation to perform well in the real world. By systematically varying simulations, the artificial brain learns to respond adaptively to new situations.

“I worked on a team using reinforcement learning to develop PlayStation games,” he says. “It was an amazing experience and gave me the chance to run simulations in a PlayStation game—a much more advanced environment than typical university simulations.”
In the advanced racing game Gran Turismo 7, researchers trained an AI to drive all kinds of cars. SPARC was even able to safely navigate new models it had never seen before, adapting to changing conditions.
From cars to socks
These methods have broad applications—not just for household robots, but also in construction, healthcare, and even self-driving cars. “Anywhere systems need to adapt to new situations, these algorithms can help,” Grooten says.
Before you can confidently hand over your laundry pile or dinner prep to a robot, more research is needed. But thanks to these new methods, Grooten’s dream—and that of many others—moves a step closer to reality. One day, it may even be the robot keeping your socks together, so you never lose the second one again.
PhD in the picture

{kind=link}
{kind=link}
{kind=link}
{kind=link}
What is on the cover of your dissertation?
“The thesis is about robots that can adapt to new environments. And what’s the ultimate environment where you have to completely adjust to new situations? Another planet! I love space travel, so the idea of developing a robot for that kind of environment sounds amazing to me.”
How would you explain your research at a birthday party in one sentence?
“I study methods to improve the adaptability of robots.”
How do you blow off steam outside the lab?
“I’ve been a passionate baseball player my whole life, but I just quit this year because I became a father. Nowadays, I do a lot of running since it’s much more flexible and easier to fit into a busy life.”
What advice would you give your younger PhD self?
“I didn’t realize how important it is to have a good connection with your supervisor. I didn’t pay attention to it at all, but luckily I was very fortunate. I would advise anyone, during job interviews, not only to sell yourself but also to pay attention to whether you feel comfortable with the people interviewing you. After all, you need to be able to work well with them.”
What’s the next chapter?
“I’ve just been offered a postdoc position in a different research group, so I’ll be staying at TU/e. I’ll be using slightly different methods than during my PhD, but I’ll still be focusing on robots. In my PhD research, I mainly worked with simulations, but now I hope to work much more with real robots—which sounds incredibly exciting to me.”
Discussion