
- Onderzoek
- 4 min
- 07/04/2026

Sluitstuk | Een handige robot die niet afgeleid wordt
In de toekomst kunnen robots allerlei saaie klusjes van mensen overnemen, zoals de vaatwasser uitruimen of kleding strijken. Om dat goed te doen en zich niet te laten afleiden, moeten ze leren irrelevante informatie uit hun omgeving te filteren. TU/e-promovendus Bram Grooten ontwikkelt algoritmes die robots helpen zich aan te passen aan nieuwe situaties en gefocust te blijven op hun taak.
Toen Bram Grooten tijdens de pitchcompetitie Talking Science zijn onderzoek in vijf minuten presenteerde, deed hij dat met een toiletborstel in de hand: een speels pleidooi voor huishoudrobots die vervelende klusjes kunnen overnemen, zoals de wc schoonmaken of kleren vouwen. Achter de grap zit echter een persoonlijke motivatie. “Het is mijn droom om het werkelijkheid te maken”, zegt Grooten.
“Toen ik vroeger als kind de vaatwasser moest uitruimen, dacht ik altijd: kan dat niet geautomatiseerd worden?” Twintig jaar later is een deel van die toekomst werkelijkheid geworden: veel huishoudens hebben een robotstofzuiger, maar verder gaat de robotische huishoudhulp nog niet. “Zelfs simpele taken zijn voor robots veel lastiger dan je zou denken”, zegt Grooten.
“Neem bijvoorbeeld kleding vouwen, waar veel onderzoek naar wordt gedaan”, legt hij uit. Hij trekt zijn eigen vest uit en gooit het verfrommeld op tafel. “Kijk, het is best lastig voor een robot om uit te vogelen hoe dat precies in elkaar zit. Alle handelingen die wij als mensen logisch vinden, moet een robot leren – en dat voor allerlei verschillende kledingstukken.”
Reinforcement learning
Om een robot tot een succesvol hulpje te maken, moet je hem eerst een taak geven, legt Grooten uit. Daarvoor kun je een robot trainen door hem talloze voorbeelden te laten zien. Daarnaast kun je op de computer simulaties bouwen, waarmee je in korte tijd veel voorbeelden genereert om de robot verder te trainen.
Vaak wordt hiervoor een methode gebruikt die reinforcement learning heet. Hierbij krijgt de robot een positieve score wanneer hij een handeling goed uitvoert, en een negatieve score als hij een fout maakt. De robot probeert vervolgens zoveel mogelijk punten te verzamelen. Door trial-and-error leert hij zo wat de bedoeling is.
Adaptiever maken
Maar vaak leert een robot op deze manier gedrag dat alleen goed werkt in de situatie waarin hij getraind is. Als er iets verandert – het kledingstuk zit anders in elkaar, of de omgeving ziet er anders uit – kan de robot in de war raken. Zet je hem bijvoorbeeld in een andere kamer, dan kan hij afgeleid raken door het behang, een houten vloer of de televisie die aanstaat.
In de toekomst beschikt een huishoudrobot mogelijk over een overvloed aan gegevens: van de temperatuur in elke kamer tot wat er nog in de keukenkastjes ligt, of hoe vaak de deurbel die dag is gegaan. “Maar voor een specifieke taak – bijvoorbeeld een kop koffie zetten – is maar een klein deel van die informatie relevant”, aldus Grooten. Al die andere prikkels kunnen juist verwarrend werken voor een robot die met standaard reinforcement learning is getraind.
Het doel is daarom om robots te ontwikkelen die zich blijven focussen op hun taak en zich niet laten afleiden door onverwachte prikkels. “In mijn onderzoeksveld proberen we robots adaptiever te maken. De methodes die we daarvoor gebruiken noemen we adaptive reinforcement learning”, legt Grooten uit. Het zorgt ervoor dat een robot beter kan generaliseren naar verschillende situaties en goed kan omgaan met nieuwe visuele achtergronden of omgevingsgeluiden. “We willen dat een robot ook bij onverwachte situaties nog steeds begrijpt wat hij moet doen”, vat hij samen.
Slimme algoritmes
Daarom ontwikkelde Grooten algoritmes zoals ANF (Automatic Noise Filtering) en MaDi (Masking Distractions), die een robot helpen om irrelevante informatie te negeren. Zo kan de robot dankzij ANF omgevingsruis eruit filteren, en kan MaDi irrelevante pixels maskeren door ze donker te maken, zodat ze de robot niet kunnen afleiden.
Door gebruik te maken van algoritmes als ANF en MaDi leert de robot zich te richten op wat er écht toe doet, ook in nieuwe en veranderende situaties.
Echte robot
Grooten testte deze methodes eerst in een simulatie: de robot voerde een simpele taak uit op een strakke, neutrale achtergrond. Vervolgens vervingen de onderzoekers de achtergrond door willekeurige beelden om te zien of de robot de taak nog steeds kon uitvoeren. Dat bleek het geval: de robot kon de achtergrond negeren en raakte niet in de war.
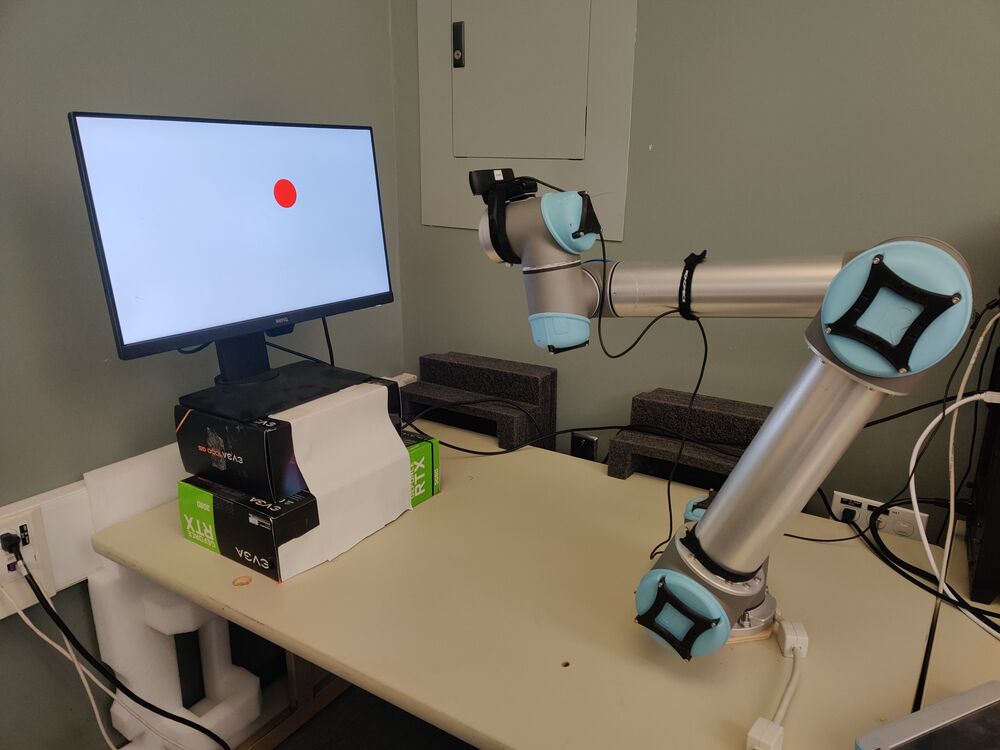
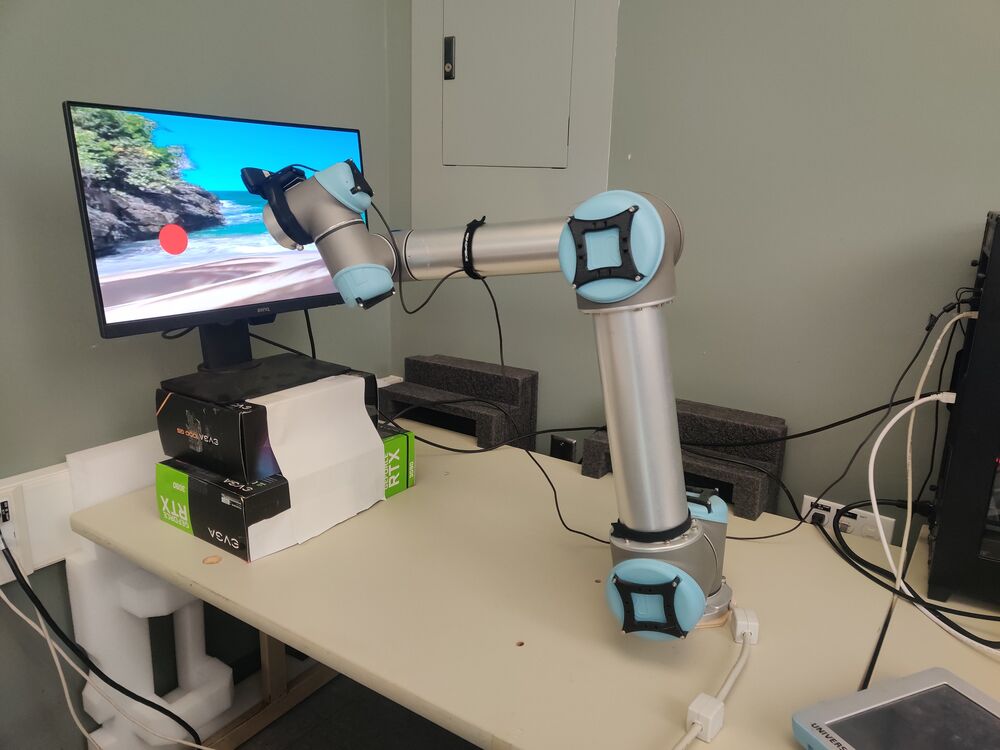
Het leukste is natuurlijk om dit met een echte robot te testen, vindt Grooten. “We leerden een klein robotje met een webcam om zo dicht mogelijk bij een rode stip op een scherm te komen”, legt hij uit. “Toen hij dat eenmaal onder de knie had, veranderden we de witte achtergrond naar allerlei verschillende plaatjes. Ook daar lieten we zien dat we met MaDi al na twee uur trainen goede resultaten krijgen.”

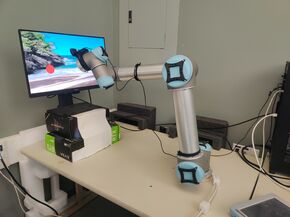
“Het mooiste aan dit onderzoek vind ik dat je een algoritme bouwt en dan echt kunt zien dat de robot doet wat hij moet doen. Dat is het moment dat het allemaal tastbaar wordt, en dat vind ik geweldig”, aldus de promovendus.
PlayStation
Tijdens zijn PhD werkte Grooten een half jaar bij Sony AI, waar hij het algoritme SPARC ontwikkelde. Hiermee kan een robot, getraind in een simulatie, ook goed functioneren in de echte wereld. Door simulaties systematisch te variëren, leert het kunstmatige brein adaptief te reageren op nieuwe situaties.

“Ik werkte daar in een team van onderzoekers dat reinforcement learning gebruikt voor het ontwikkelen van PlayStation-games”, vertelt hij. “Dat was echt een gave ervaring en het gaf me ook de kans om simulaties te doen in zo'n game – dat is een veel geavanceerdere omgeving dan de simulaties die we normaal op de universiteit gebruiken.”
In het geavanceerde racespel Gran Turismo 7 trainden onderzoekers een AI om allerlei auto’s te besturen. Zelfs nieuwe modellen die de AI nog nooit had gezien, kon SPARC veilig rondrijden en aanpassen aan nieuwe omstandigheden.
Van auto’s tot sokken
Overigens zijn deze methodes breed toepasbaar – niet alleen voor huishoudrobots, maar ook voor robots in de bouw, in de zorg of zelfs zelfrijdende voertuigen. “Overal waar systemen zich moeten aanpassen aan nieuwe situaties, kunnen de algoritmes helpen”, zegt Grooten.
Voordat je met een gerust hart een robot je stapel was laat strijken of het avondeten laat bereiden, is er nog heel wat onderzoek nodig. Maar dankzij deze nieuwe methodes komt Grootens droom – en die van vele anderen – weer een stapje dichter bij de werkelijkheid. Wie weet, misschien is het straks de robot die je sokken altijd bij elkaar houdt en nooit meer de tweede kwijt is.
PhD in the picture

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Wat zien we op je proefschriftkaft?
“De thesis gaat over robots die adaptief zijn in nieuwe omgevingen. Wat is nou bij uitstek een omgeving waar we ons totaal moeten aanpassen aan nieuwe situaties? Een andere planeet! Ik hou van ruimtevaart, dus het lijkt me geweldig om een robot voor zo’n omgeving te ontwikkelen.”
Je bent op een verjaardagsfeestje. Hoe leg je in één zin uit wat je onderzoekt?
“Ik onderzoek methodes om het aanpassingsvermogen van robots te verbeteren.”
Hoe blaas je naast je onderzoek stoom af?
“Ik ben mijn hele leven een fanatieke honkballer geweest, maar ik ben net dit jaar gestopt, omdat ik vader ben geworden. Tegenwoordig loop ik veel hard, omdat dat veel flexibeler in te passen is in een druk leven.”
Welke tip had je als beginnende PhD-kandidaat willen krijgen?
“Ik had niet door hoe belangrijk het is om een goede klik te hebben met je begeleider. Ik lette er helemaal niet op, maar gelukkig had ik veel mazzel. Daarom zou ik iedereen aanraden tijdens sollicitatiegesprekken niet alleen jezelf te verkopen, maar ook te kijken of je een goed gevoel hebt bij de mensen die je interviewen. Uiteindelijk moet je prettig met hen kunnen samenwerken.”
Wat is je volgende hoofdstuk?
“Ik heb net een postdoc-positie aangeboden gekregen in een andere onderzoeksgroep, dus ik blijf aan de TU/e werken. Ik zal iets andere methodes toepassen dan in mijn promotieonderzoek, maar blijf me nog steeds op robots richten. Tijdens mijn PhD werkte ik vooral met simulaties, maar nu hoop ik veel meer met echte robots te kunnen werken – dat lijkt me echt ontzettend gaaf.”
Discussie